 |
...Image
Processing Fundamentals
Standard
NTSC
PAL
SECAM
Property
images
/ second
29.97
25
25
ms
/ image
33.37
40.0
40.0
lines
/ image
525
625
625
(horiz./vert.)
= aspect ratio
4:3
4:3
4:3
interlace
2:1
2:1
2:1
µs
/ line
63.56
64.00
64.00
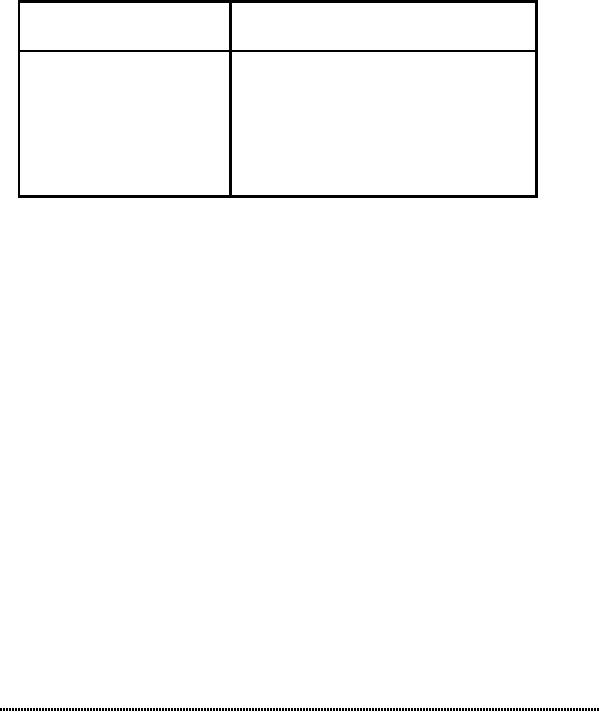
Table
3: Standard
video parameters
In
an interlaced image the odd numbered
lines (1,3,5,...) are
scanned in half of
the
allotted
time (e.g. 20 ms in PAL) and
the even numbered lines
(2,4,6,...) are
scanned
in the remaining half. The
image display must be
coordinated with this
scanning
format. (See Section 8.2.)
The reason for interlacing
the scan lines of a
video
image is to reduce the
perception of flicker in a displayed
image. If one is
planning
to use images that have
been scanned from an
interlaced video source, it is
important
to know if the two
half-images have been
appropriately "shuffled" by
the
digitization
hardware or if that should be
implemented in software. Further,
the
analysis
of moving objects requires
special care with interlaced
video to avoid
"zigzag"
edges.
The
number of rows (N)
from a video source
generally corresponds
onetoone
with
lines in the video image.
The number of columns,
however, depends on the
nature
of the electronics that is
used to digitize the image.
Different frame
grabbers
for
the same video camera
might produce M
= 384,
512, or 768 columns
(pixels)
per
line.
3.
Tools
Certain
tools are central to the
processing of digital images. These
include
mathematical
tools such as convolution,
Fourier
analysis,
and statistical
descriptions, and
manipulative tools such as
chain
codes and
run
codes. We will
present
these tools without any
specific motivation. The
motivation will follow in
later
sections.
3.1
CONVOLUTION
There
are several possible notations to
indicate the convolution of two
(multi-
dimensional)
signals to produce an output signal. The
most common are:
c
=a ⊗b = a∗b
(1)
6
...Image
Processing Fundamentals
We
shall use the first
form, c
= a ⊗ b , with
the following formal
definitions.
In
2D continuous space:
+∞
+∞
∫
∫ a(
χ ,ζ
)b(
x
- χ ,
y
- ζ )dχdζ
c
(x,
y) =
a( x,
y
) ⊗
b( x,
y
) =
(2)
-∞
-∞
In
2D discrete space:
+∞
+∞
∑
∑a[
j
, k
]b[
m
- j, n
- k]
c[m, n]
=
a[m
, n]
⊗
b[m,
n] =
(3)
j=-∞
k
=-∞
3.2
P ROPERTIES OF CONVOLUTION
There
are a number of important
mathematical properties associated
with
convolution.
·
Convolution is commutative.
c
=a ⊗b = b⊗ a
(4)
·
Convolution is associative.
c
= a ⊗ (b ⊗ d ) =
(a
⊗ b) ⊗
d
= a ⊗ b ⊗ d
(5)
·
Convolution is distributive.
c
= a ⊗ (b + d ) =
(a
⊗ b) +
(
a
⊗ d)
(6)
where
a, b,
c, and d are
all images, either
continuous or discrete.
3.3
F OURIER TRANSFORMS
The
Fourier transform produces
another representation of a signal,
specifically a
representation
as a weighted sum of complex
exponentials. Because of
Euler's
formula:
e
jq = cos(q ) +
jsin(
q)
(7)
where
j
2 =
-1 , we can say
that the Fourier transform
produces a representation of
a
(2D) signal as a weighted
sum of sines and cosines.
The defining formulas
for
the
forward Fourier and the
inverse Fourier transforms
are as follows. Given
an
image
a
and
its Fourier transform
A, then
the forward transform goes
from the
7
...Image
Processing Fundamentals
spatial
domain (either continuous or
discrete) to the frequency
domain which is
always
continuous.
A
= F
{a}
(8)
Forward
The
inverse Fourier transform
goes from the frequency
domain back to the
spatial
domain.
a
= F
-1 {A}
(9)
Inverse
The
Fourier transform is a unique
and invertible operation so
that:
{F
-1 {A}}
{F
{a}}
a
= F
-1
A=
F
and
(10)
The
specific formulas for
transforming back and forth between
the spatial domain
and
the frequency domain are
given below.
In
2D continuous space:
+∞
+∞
a
(x,
y)e
-
j(ux
+ vy) dxdy
∫
∫
A(u, v)
=
(11)
Forward
-∞
-∞
+∞
+∞
1
A(u, v)e +
j
(ux
+vy )dudv
4 2
-∫ -∫
a(
x
, y)
=
(12)
Inverse
∞ ∞
In
2D discrete space:
+∞
+∞
∑
∑a[
m, n
]e- j (Ωm +Ψn )
A(Ω,
Ψ ) =
(13)
Forward
m
=-∞
n=-∞
+
+
1
A(Ω,
Ψ )e
+
j(Ωm +Ψn) dΩdΨ
∫
∫
a[m, n]
=
(14)
Inverse
4 2
-
-
3.4
P ROPERTIES OF F OURIER TRANSFORMS
There
are a variety of properties
associated with the Fourier
transform and the
inverse
Fourier transform. The
following are some of the
most relevant for
digital
image
processing.
8
...Image
Processing Fundamentals
·
The Fourier transform is, in
general, a complex function of
the real frequency
variables.
As such the transform can be
written in terms of its
magnitude and
phase.
A(u, v)
=
A( u,
v
) e
jϕ (u, v)
A(Ω,
Ψ) =
A(Ω, Ψ) e
jϕ (
Ω,Ψ)
(15)
·
A 2D signal can also be
complex and thus written in
terms of its magnitude
and
phase.
a(
x
, y)
=
a( x,
y
) e
jϑ(
x, y)
a[m , n]
=
a[m,
n] e
jϑ[
m, n]
(16)
·
If a 2D signal is real, then
the Fourier transform has
certain symmetries.
A(u, v)
=
A* ( -u, -
v)
A(Ω,
Ψ) =
A* (-Ω, -Ψ
)
(17)
The
symbol (*) indicates complex
conjugation. For real
signals eq. (17)
leads
directly
to:
A(u, v)
=
A
(-
u, -v)
ϕ
(u,
v) =
-ϕ ( -u, -
v
)
(18)
A(Ω,
Ψ) =
A(-Ω, -Ψ
)
ϕ
(Ω,
Ψ) =
-ϕ ( -Ω,
-Ψ )
·
If a 2D signal is real and
even, then the Fourier
transform is real and
even.
A(u, v)
=
A(-
u, -v )
A(Ω,
Ψ ) =
A(-Ω, -Ψ
)
(19)
·
The Fourier and the
inverse Fourier transforms
are linear operations.
F
{w1a
+ w2 b} = F
{w1 a} + F
{w2 b} = w1 A
+ w2 B
(20)
F
-1 {w1 A
+ w2B} = F
-1 {w1 A} + F
-1{w2 B} = w1 a
+ w2 b
where
a
and
b
are 2D signals
(images) and w1 and w2 are
arbitrary, complex
constants.
·
The Fourier transform in
discrete space, A(Ω,Ψ),
is periodic in both Ω
and
Ψ.
Both
periods are 2.
A(Ω+ 2j , Ψ
+ 2k ) =
A( Ω, Ψ)
j,
k
integers
(21)
·
The energy, E
, in a signal
can be measured either in
the spatial domain or
the
frequency
domain. For a signal with
finite energy:
9
...Image
Processing Fundamentals
Parseval's
theorem (2D
continuous space):
+∞
+∞
+∞
+∞
1
E
= ∫ ∫ a(
x, y)
dxdy
= 2
∫∫
2
A(u, v)
2 dudv
(22)
4
-∞
-∞
-∞
-∞
Parseval's
theorem (2D
discrete space):
+
+
+∞
+∞
1
E
= ∑ ∑ a[m, n]
= 2
∫∫
2
A(Ω,
Ψ ) 2 dΩdΨ
(23)
4
m=-∞
n=-∞
-
-
This
"signal energy" is not to be
confused with the physical
energy in the
phenomenon
that produced the signal. If,
for example, the value
a[m,n] represents
a
photon
count, then the physical
energy is
proportional to the amplitude,
a, and
not
the
square of the amplitude.
This is generally the case
in video imaging.
·
Given three, multi-dimensional signals
a, b,
and c
and
their Fourier transforms
A,
B
, and C:
F
c
=a ⊗b
↔
C
= A· B
and
(24)
F
1
c
=a· b
↔
C=
2
A⊗B
4
In
words, convolution in the
spatial domain is equivalent to
multiplication in the
Fourier
(frequency) domain and vice-versa.
This is a central result
which provides
not
only a methodology for the
implementation of a convolution but
also insight
into
how two signals interact
with each other--under
convolution--to produce a
third
signal. We shall make
extensive use of this result
later.
·
If a two-dimensional signal a(x,y) is scaled in
its spatial coordinates then:
(
)
→
If
a(
x, y
)
a
Mx · x
, My · y
(25)
→
A
u M
, v
M
M
x · My
Then
A(u, v)
y
x
·
If a two-dimensional signal a(x,y) has
Fourier spectrum A(u,v)
then:
+∞
+∞
∫
∫ a(
x, y
)dxdy
A(u = 0,
v
= 0)
=
-∞
-∞
(26)
+∞
+∞
1
2
∫
∫ A(u,
v)dxdy
a(
x
= 0,
y
= 0
) =
4 -∞ -∞
10
...Image
Processing Fundamentals
·
If a two-dimensional signal a(x,y) has
Fourier spectrum A(u,v)
then:
a(
x, y)
F
a(x , y)
F
↔
juA(u, v)
↔
jvA(u, v)
x
y
(27)
a
(x
, y)
F
a(
x
, y)
F
2
2
↔
- u
2 A(u, v)
↔
- v
2 A(u, v)
x2
y2
3.4.1
Importance of phase and
magnitude
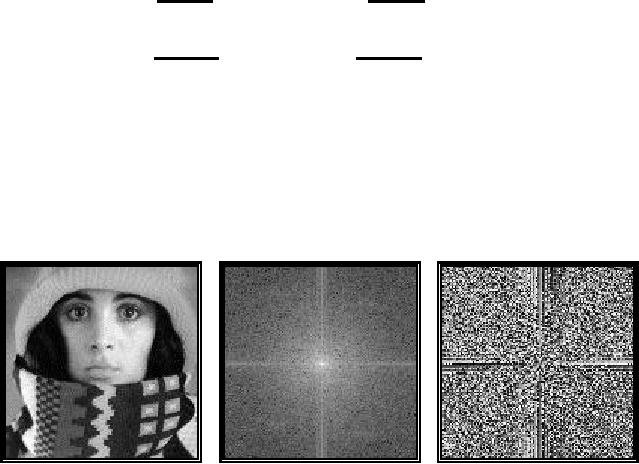
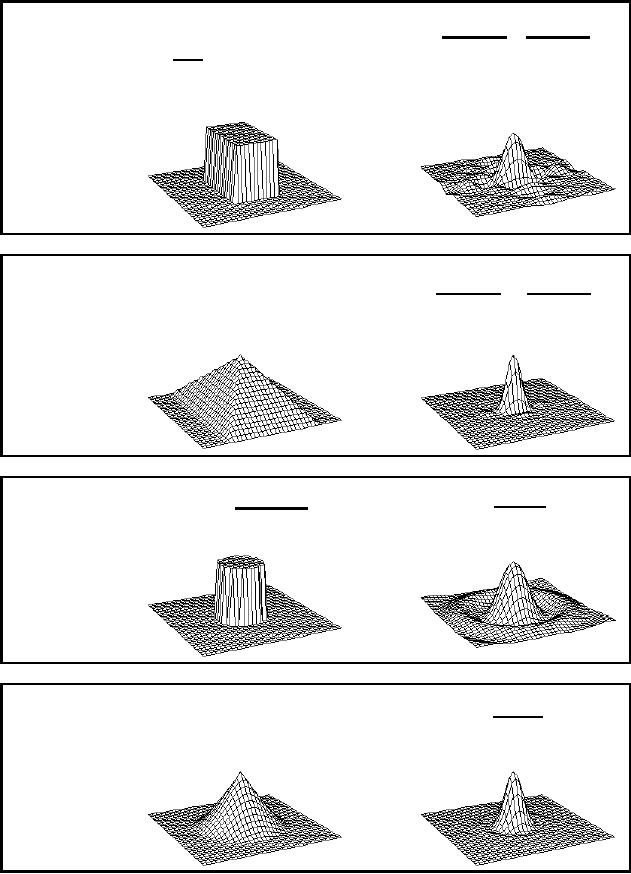
Equation
(15) indicates that the
Fourier transform of an image
can be complex.
This
is illustrated below in Figures
4a-c. Figure 4a shows the
original image
a[m,n],
Figure 4b the magnitude in a scaled
form as log(|A(Ω,Ψ)|),
and Figure 4c
the
phase ϕ(Ω,Ψ).
Figure
4a
Figure
4b
Figure
4c
log(|A(Ω,Ψ)|)
ϕ(Ω,Ψ)
Original
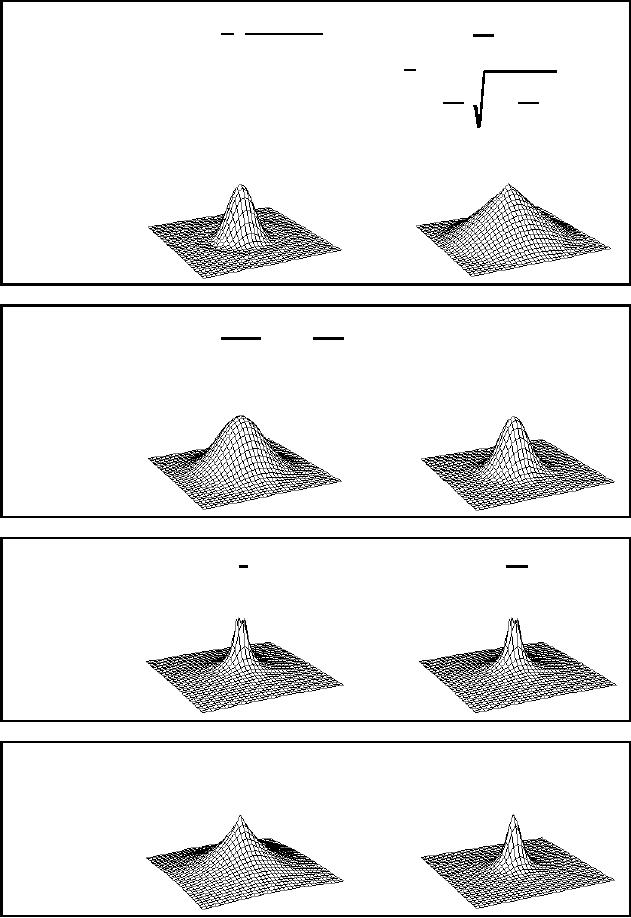
Both
the magnitude and the phase
functions are necessary for
the complete
reconstruction
of an image from its Fourier
transform. Figure 5a shows
what
happens
when Figure 4a is restored solely on
the basis of the
magnitude
information
and Figure 5b shows what
happens when Figure 4a is restored
solely
on
the basis of the phase
information.
11

...Image
Processing Fundamentals
Figure
5a
Figure
5b
ϕ(Ω,Ψ) = 0
|A(Ω,Ψ)|
= constant
Neither
the magnitude information
nor the phase information is
sufficient to restore
the
image. The magnitudeonly image
(Figure 5a) is unrecognizable and has
severe
dynamic
range problems. The phase-only image
(Figure 5b) is barely
recognizable,
that
is, severely degraded in
quality.
3.4.2
Circularly symmetric
signals
An
arbitrary 2D signal a(x,y)
can always be written in a polar
coordinate system as
a(r,θ).
When the 2D signal exhibits
a circular symmetry this
means that:
a(
x
, y)
=
a(r,θ )
=
a(r
)
(28)
where
r2 = x2 + y2 and tanθ
=
y/x.
As a number of physical systems
such as lenses
exhibit
circular symmetry, it is useful to be
able to compute an appropriate
Fourier
representation.
The
Fourier transform A(u, v) can be written
in polar coordinates A(ωr,ξ) and
then,
for
a circularly symmetric signal,
rewritten as a Hankel
transform:
∞
A(u, v)
=
F
{a(
x
, y
)}
= 2 ∫ a(r )J
o(ωr
r)rdr
= A (ω
r
)
(29)
0
where
ω2
=
u 2 +
v 2 and tanξ
= v u
and Jo(·) is a
Bessel function of the first
kind
r
of
order zero.
The
inverse Hankel
transform is given
by:
∞
1
∫
A(ωr
)J
o(ω rr )ω rdω r
a(
r) =
(30)
2
0
12
...Image
Processing Fundamentals
The
Fourier transform of a circularly
symmetric 2D signal is a function of
only the
radial
frequency, ωr. The dependence
on the angular frequency, ξ,
has vanished.
Further,
if a(x,y) = a(r)
is real, then it is automatically
even due to the
circular
symmetry.
According to equation (19),
A(ωr) will then be
real and even.
3.4.3
Examples of 2D signals and
transforms
Table
4 shows some basic and
useful signals and their 2D
Fourier transforms. In
using
the table entries in the
remainder of this chapter we will
refer to a spatial
domain
term as the point
spread function (PSF)
or the 2D
impulse response and
its
Fourier
transforms as the optical
transfer function (OTF)
or simply transfer
function.
Two standard signals used in this
table are u(·),
the unit step function,
and
J1(·),
the Bessel function of the
first kind. Circularly
symmetric signals are
treated
as
functions of r
as in eq.
(28).
3.5
STATISTICS
In
image processing it is quite
common to use simple
statistical descriptions of
images
and subimages. The
notion of a statistic is intimately
connected to the
concept
of a probability distribution, generally
the distribution of signal
amplitudes.
For
a given region--which could
conceivably be an entire image--we
can define
the
probability distribution
function of
the brightnesses in that region and
the
probability
density
function of
the brightnesses in that
region. We will assume in
the
discussion that follows that we
are dealing with a digitized
image a[m,n].
3.5.1
Probability distribution function of the
brightnesses
The
probability distribution function,
P
(a),
is the probability that a
brightness
chosen
from the region is less than
or equal to a given brightness
value a.
As a
increases
from ∞
to + ∞,
P
(a)
increases from 0 to 1. P
(a)
is monotonic, non-
decreasing
in a
and thus
dP
/da
≥ 0.
3.5.2
Probability density function of the
brightnesses
The
probability that a brightness in a
region falls between
a
and
a+Ća, given
the
probability
distribution function P
(a),
can be expressed as p(a)Ća where
p(a)
is the
probability
density function:
dP( a)
p(
a)Ć
a
=
Ća
(31)
da
13
...Image
Processing Fundamentals
Ra, b
( x
, y)
=
sin(aω x
)
sin(
bωy
)
F
T.1
Rectangle
↔
aω x
bω y
1
u(a2 -
x 2)u(
b2 -
y 2 )
4ab
Ra, b
( x
, y)
⊗
Ra,b
(x
, y)
F
2
sin(aω x
)
sin(
bω y
)
T.2
Pyramid
2
↔
aω x
bω y
J1(aω
)
u(a2 -
r2 )
2
F
T.3
Cylinder
Pa (r
) =
↔
aω
a2
Pa (r
) ⊗
Pa(r )
J
( aω
)
F
2
4 1
T.4
Cone
↔
aω
14
...Image
Processing Fundamentals
1
J1(ω
cr / 2 )
2
-1
ω
F
T.5
Airy
PSF
PSF(r ) =
↔
cos
-
ωc
r
2
u(ω c2
-
ω
ω
2
ω
ω 1-
ω
c
c
G2 D( f
, σ
) = exp(-ω 2σ
2
/ 2)
r2
F
T.6
Gaussian
1
g2 D
(r
,σ
) =
2
exp -
↔
2σ 2
2σ
2
F
1
T.7
Peak
↔
ω
r
e
-
ar
2a / (ω
2
+
a 2 )3 /
2
F
T.8
Exponential
↔
Decay
Table
4: 2D Images and
their Fourier
Transforms
15
...Image
Processing Fundamentals
Because
of the monotonic, non-decreasing character of
P
(a)
we have that:
+∞
∫
p(a)da
= 1
p(
a) ≥
0
and
(32)
∞
For
an image with quantized
(integer) brightness amplitudes,
the interpretation of
Ća is the
width of a brightness interval. We
assume constant width
intervals. The
brightness
probability density
function is
frequently estimated by counting
the
number
of times that each
brightness occurs in the
region to generate a histogram,
h[a]. The
histogram can then be normalized so
that the total area
under the
histogram
is 1 (eq. (32)). Said
another way, the p[a]
for a region is the
normalized
count
of the number of pixels, Λ,
in a region that have
quantized brightness a:
1
Λ
= ∑ h[
a]
p[a] =
h[a]
with
(33)
Λ
a
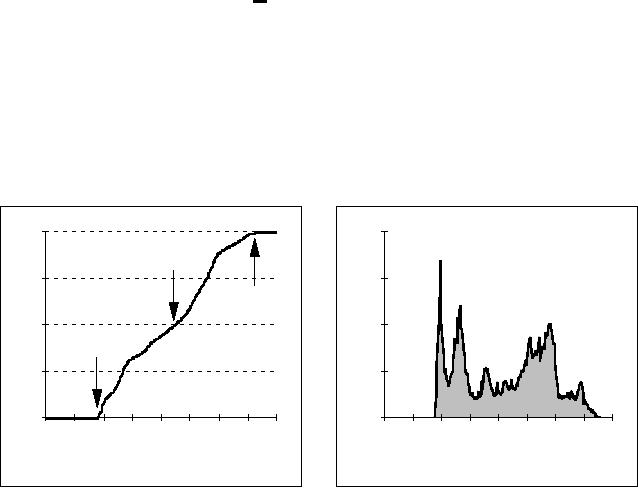
The
brightness probability distribution
function
for the image shown in
Figure 4a is
shown
in Figure 6a. The
(unnormalized) brightness histogram of
Figure 4a which
is
proportional to the estimated brightness
probability density function is
shown in
Figure
6b. The height in this
histogram corresponds to the number of
pixels with a
given
brightness.
1.00
1600
median
0.75
1200
maximum
0.50
800
mimimum
0.25
400
0.00
0
0
32
64
96 128 160 192 224
256
0
32
64 96 128 160 192 224
256
Brightness
Brightness
(a)
(b)
Figure
6: (a)
Brightness distribution function of
Figure 4a with minimum,
median,
and
maximum
indicated.
See text for explanation.
(b) Brightness histogram of
Figure 4a.
Both
the distribution function
and the histogram as measured
from a region are a
statistical
description of that region. It
must be emphasized that both
P
[a]
and p[a]
should
be viewed as estimates
of true
distributions when they are
computed from a
specific
region. That is, we view an
image and a specific region
as one realization of
16
...Image
Processing Fundamentals
the
various random processes
involved in the formation of
that image and that
region.
In the same context, the
statistics defined below must be
viewed as
estimates
of the underlying
parameters.
3.5.3
Average
The
average brightness of a region is
defined as the sample
mean of the
pixel
brightnesses
within that region. The
average, ma, of the
brightnesses over the Λ
pixels
within a region (ℜ) is given
by:
1
∑
a[
m, n
]
ma =
(34)
Λ
(
m, n)∈ℜ
Alternatively,
we can use a formulation based
upon the (unnormalized)
brightness
histogram,
h(a)
= Λ·p(a), with
discrete brightness values
a. This
gives:
1
∑
a
· h[a]
ma =
(35)
Λ a
The
average brightness, ma, is an estimate of
the mean brightness, µa, of
the
underlying
brightness probability
distribution.
3.5.4
Standard deviation
The
unbiased
estimate of the
standard deviation, sa, of the
brightnesses within a
region
(ℜ) with
Λ pixels is
called the sample
standard deviation and is
given by:
1
∑
(a[
m, n]
-
ma )
2
=
sa
Λ
- 1
m,n ∈ℜ
(36)
∑
a2 [m,
n] -
Λma
2
m,
n∈ℜ
=
Λ
-1
Using
the histogram formulation
gives:
∑ a
· h[a ]
-Λ ·
ma
2
2
a
=
sa
(37)
Λ
-1
The
standard deviation, sa, is an estimate of
σa
of the
underlying brightness
probability
distribution.
17

...Image
Processing Fundamentals
3.5.5
Coefficient-of-variation
The
dimensionless coefficientofvariation,
CV, is defined
as:
sa
CV
=
×
100%
(38)
ma
3.5.6
Percentiles
The
percentile, p%,
of an unquantized
brightness
distribution is defined as
that
value
of the brightness a
such
that:
P
(a)
= p%
or
equivalently
a
∫
p(α )dα = p%
(39)
∞
Three
special cases are frequently
used in digital image
processing.
the
minimum
value in
the region
·
0%
the
median
value in
the region
·
50%
the
maximum
value in
the region
·
100%
All
three of these values can be
determined from Figure
6a.
3.5.7
Mode
The
mode of the distribution is
the most frequent brightness
value. There is no
guarantee
that a mode exists or that it is
unique.
3.5.8
SignaltoNoise ratio
The
signaltonoise ratio, SNR,
can have several definitions.
The noise is
characterized
by its standard deviation, sn. The
characterization of the signal
can
differ.
If the signal is known to
lie between two boundaries,
amin ≤
a
≤ amax,
then
the
SNR
is defined
as:
a
-
amin
SNR
= 20
log10
max
dB
(40)
Bounded
signal
sn
If
the signal is not bounded
but has a statistical distribution
then two other
definitions
are known:
Stochastic
signal
ma
SNR
= 20
log10
dB
(41)
S
& N inter-dependent
sn
18
...Image
Processing Fundamentals
s
SNR
= 20
log10
a
dB
(42)
S
& N independent
sn
where
ma and sa are
defined above.
The
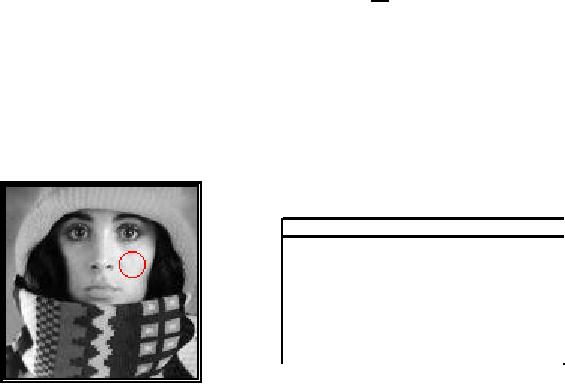
various statistics are given
in Table 5 for the image
and the region shown
in
Figure
7.
Statistic
Image
ROI
Average
137.7
219.3
Standard
Deviation
49.5
4.0
Minimum
56
202
Median
141
220
Maximum
241
226
Mode
62
220
NA
SNR
(db)
33.3
Figure
7
Table
5
Region
is the interior of the
circle.
Statistics
from Figure 7
A
SNR
calculation
for the entire
image
based on eq. (40) is not
directly available.
The
variations in the image
brightnesses that lead to
the large value of s (=49.5)
are
not,
in general, due to noise but to the
variation in local information.
With the help
of
the region there is a way to
estimate the SNR.
We can use the sℜ (=4.0)
and the
dynamic
range, amax amin,
for the image (=24156)
to calculate a global SNR
(=33.3
dB). The underlying
assumptions are that 1) the
signal is approximately
constant
in that region and the
variation in the region is
therefore due to noise, and,
2)
that the noise is the
same over the entire
image with a standard
deviation given
by
sn = sℜ.
3.6
CONTOUR REPRESENTATIONS
When
dealing with a region or
object, several compact representations are
available
that
can facilitate manipulation of and measurements on
the object. In each case
we
assume
that we begin with an image
representation of the object as shown in
Figure
8a,b.
Several techniques exist to
represent the region or
object by describing
its
contour.
3.6.1
Chain code
This
representation is based upon the
work of Freeman [11]. We follow
the
contour
in a clockwise manner and keep
track of the directions as we go
from one
contour
pixel to the next. For
the standard implementation of
the chain code we
19
...Image
Processing Fundamentals
consider
a contour pixel to be an object
pixel that has a background
(non-object)
pixel
as one or more of its 4-connected
neighbors. See Figures 3a and
8c.
The
codes associated with eight
possible directions are the
chain codes and, with
x
as
the current contour pixel
position, the codes are
generally defined as:
321
Chain
codes =
4 x 0
(43)
567
Digitization
(b)
(a)
Contour
Run
Lengths
(c)
(d)
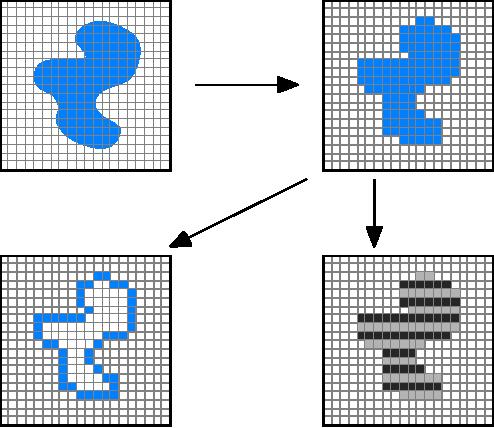
Figure
8: Region
(shaded) as it is transformed from
(a) continuous to (b)
discrete
form and then considered as a (c)
contour or (d) run
lengths
illustrated
in alternating colors.
3.6.2
Chain code
properties
·
Even codes {0,2,4,6}
correspond to horizontal and vertical
directions; odd codes
{1,3,5,7}
correspond to the diagonal
directions.
·
Each code can be considered as the
angular direction, in multiples of
45°, that
we
must
move to go from one contour
pixel to the next.
·
The absolute coordinates [m,n] of the
first contour pixel (e.g.
top, leftmost)
together
with the chain code of
the contour represent a complete
description of the
discrete
region contour.
20
...Image
Processing Fundamentals
·
When there is a change
between two consecutive
chain codes, then the
contour
has
changed direction. This
point is defined as a corner.
3.6.3
"Crack" code
An
alternative to the chain
code for contour encoding is
to use neither the
contour
pixels
associated with the object
nor the contour pixels
associated with
background
but
rather the line, the
"crack", in between. This is
illustrated with an
enlargement
of
a portion of Figure 8 in Figure
9.
The
"crack" code can be viewed as a
chain code with four
possible directions
instead
of eight.
1
Crack
codes = 2
x
0
(44)
3
Close
up
(a)
(b)
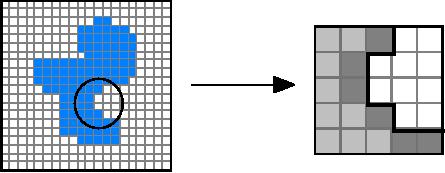
Figure
9: (a)
Object including part to be
studied. (b) Conto ur
pixels
as used in the chain code
are diagonally shaded.
The
"crack"
is shown with the thick
black line.
The
chain code for the enlarged
section of Figure 9b, from
top to bottom, is
{5,6,7,7,0}.
The crack code is
{3,2,3,3,0,3,0,0}.
3.6.4
Run codes
A
third representation is based on
coding the consecutive
pixels along a row--a
run--that
belong to an object by giving
the starting position of the
run and the
ending
position of the run. Such
runs are illustrated in
Figure 8d. There are
a
number
of alternatives for the
precise definition of the
positions. Which
alternative
should
be used depends upon the
application and thus will
not be discussed here.
21
Table of Contents:
- Introduction
- Digital Image Definitions:COMMON VALUES, Types of operations, VIDEO PARAMETERS
- Tools:CONVOLUTION, FOURIER TRANSFORMS, Circularly symmetric signals
- Perception:BRIGHTNESS SENSITIVITY, Wavelength sensitivity, OPTICAL ILLUSIONS
- Image Sampling:Sampling aperture, Sampling for area measurements
- Noise:PHOTON NOISE, THERMAL NOISE, KTC NOISE, QUANTIZATION NOISE
- Cameras:LINEARITY, Absolute sensitivity, Relative sensitivity, PIXEL FORM
- Displays:REFRESH RATE, INTERLACING, RESOLUTION
- Algorithms:HISTOGRAM-BASED OPERATIONS, Equalization, Binary operations, Second Derivatives
- Techniques:SHADING CORRECTION, Estimate of shading, Unsharp masking
- Acknowledgments
- References