 |
Advanced Computer
Architecture-CS501
Advanced
Computer Architecture
Lecture
21
Reading
Material
Vincent
P. Heuring&Harry F. Jordan
Chapter
5
Computer
Systems Design and Architecture
5.2
Summary
�
Data
Forwarding Hardware
�
Instruction
Level Parallelism
�
Difference
between Pipelining and Instruction-Level
Parallelism
�
Superscalar
Architecture
�
Superscalar
Design
�
VLIW
Architecture
Maximum
Distance between two
instructions
Example
Read
page no. 219 of Computer
System Design and Architecture
(Vincent
P.Heuring,
Harry F. Jordan)
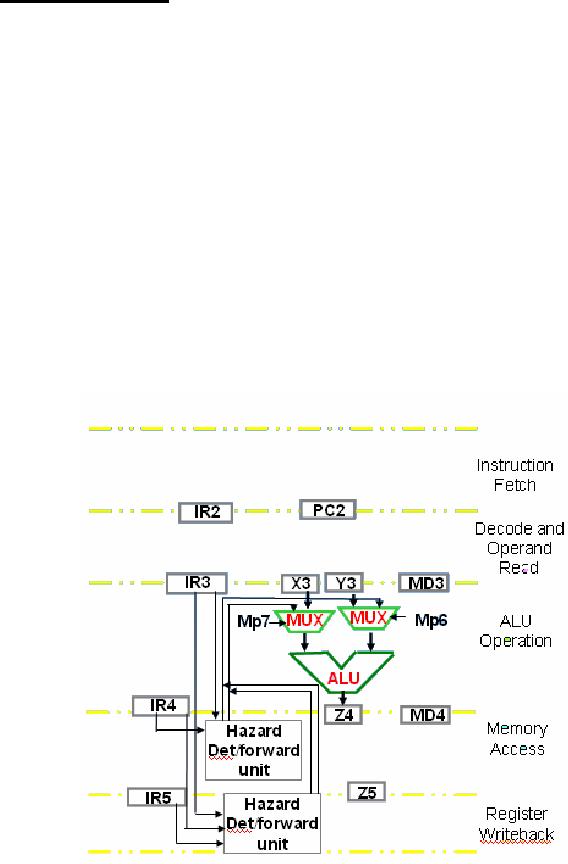
Data
forwarding Hardware
The
concept of data forwarding was
introduced in the previous
lecture.
RTL
for
data
Page
220
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
forwarding
in case of ALU instructions
Dependence
RTL
alu5&alu3:((ra5=rb3):X←Z5,
Stage
3-5
(ra5=rc3)&!imm3:
Y ←
Z5);
alu4&alu3:((ra4=rb3):X←Z4,
Stage
3-4
(ra4=rc3)&!imm3:
Y ←
Z4);
Instruction-Level
Parallelism
Increasing
a processor's throughput
There
are two ways to increase
the number of instructions
executed in a given time by
a
processor
� By
increasing the clock
speed
� By
increasing the number of
instructions that can execute in
parallel
Increasing
the clock speed
�
Increasing the clock speed
is an IC design issue and depends on the
advancements in
chip
technology.
� The
computer architect or logic designer can
not thus manipulate clock
speeds to
increase
the throughput of the
processor.
Increasing
parallel execution of
instructions
The
computer architect cannot
increase the clock speed of
a microprocessor however
he/she can
increase the number of
instructions processed per unit
time. In pipelining we
discussed
that a number of instructions
are executed in a staggered
fashion, i.e. various
instructions
are simultaneously executing in
different segments of the
pipeline. Taking
this
concept a step further we
have multiple data paths hence
multiple pipelines can
execute
simultaneously. There are
two main categories of these
kinds of parallel
instruction
processors VLIW (very long
instruction word) and superscalar.
The
two approaches to achieve
instruction-level parallelism
are
Superscalar
Architecture
A scalar
processor that can issue
multiple instructions simultaneously is
said to be
superscalar
VLIW
Architecture
A VLIW
processor is based on a very
long instruction word. VLIW
relies on
instruction
scheduling by the compiler.
The compiler forms
instruction packets which
can
run in
parallel without
dependencies.
Page
221
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
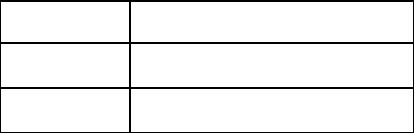
Difference
between Pipelining and Instruction-Level
Parallelism
Pipelining
Instruction-Level
Parallelism
Single
functional unit
Multiple
functional units
Instructions
are issued
sequentially
Instructions
are issued in
parallel
Throughput
increased by overlapping the
Instructions are not
overlapped but
instruction
execution
executed
in parallel in multiple
functional
units
Very
little extra hardware
required to Multiple functional
units within the
CPU
implement
pipelining
are
required
Superscalar
Architecture
A superscalar
machine has following
typical features
� It
has one or more IUs (integer
units) , FPUs (floating point
units), and BPUs
(branch
prediction
units)
� It
divides instructions into
three classes
o Integer
o Floating
point
o Branch
prediction
The
general operation of a superscalar
processor is as follows
�
Fetch multiple
instructions
�
Decode some of their
portion to determine the
class
�
Dispatch them to the
corresponding functional
unit
As stated
earlier the superscalar design uses
multiple pipelines to implement
instruction
level
parallelism.
Operation
of Branch Prediction
Unit
�
BPU
calculates the branch target
address ahead of time to
save CPU cycles
�
Branch
instructions are routed from
the queue to the BPU where
target address is
calculated
and supplied when required
without any stalls
�
BPU also
starts executing branch instructions by
speculating and discards the
results
if the
prediction turns out to be
wrong
Superscalar
Design
The
philosophy behind a superscalar design
is
� to
prefetch and decode as many
instructions as possible before
execution
Page
222
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
�
and to
start several branch
instruction streams speculatively on
the basis of this
decoding
�
and
finally, discarding all but
the correct stream of
execution
The
superscalar architecture uses multiple
instruction issues and uses
techniques such as
branch
prediction and speculative instruction
execution, i.e. it speculates on
whether a
particular
branch will be taken or not and
then continues to execute it and
the following
instructions.
The results are not
written back to the registers until
the branch decision
is
confirmed.
Most superscalar architectures contain a
reorder buffer. The reorder
buffer
acts
like an intermediary between
the processor and the
register file. All results
are
written
onto the reorder buffer and
when the speculated course of action is
confirmed, the
reorder
buffer is committed to the
register file.
Superscalar
Processors
Examples
of superscalar processors
o PowerPC
601
o Intel
P6
o DEC
Alpha 21164
VLIW
Architecture
VLIW
stands for "Very Long
Instruction Word" typically 64 or 128
bits wide. The
longer
instruction
word carries information to route
data to register files and
execution units.
The
execution-order decisions are made at
the compile time unlike
the superscalar design
where
decisions are made at run
time. Branch instructions
are not handled very
efficiently
in this
architecture. VLIW compiler makes
use of techniques such as
loop unrolling and
code
reordering to minimize dependencies and
the occurrence of branch
instructions.
Page
223
Last
Modified: 01-Nov-06
Table of Contents:
- Computer Architecture, Organization and Design
- Foundations of Computer Architecture, RISC and CISC
- Measures of Performance SRC Features and Instruction Formats
- ISA, Instruction Formats, Coding and Hand Assembly
- Reverse Assembly, SRC in the form of RTL
- RTL to Describe the SRC, Register Transfer using Digital Logic Circuits
- Thinking Process for ISA Design
- Introduction to the ISA of the FALCON-A and Examples
- Behavioral Register Transfer Language for FALCON-A, The EAGLE
- The FALCON-E, Instruction Set Architecture Comparison
- CISC microprocessor:The Motorola MC68000, RISC Architecture:The SPARC
- Design Process, Uni-Bus implementation for the SRC, Structural RTL for the SRC instructions
- Structural RTL Description of the SRC and FALCON-A
- External FALCON-A CPU Interface
- Logic Design for the Uni-bus SRC, Control Signals Generation in SRC
- Control Unit, 2-Bus Implementation of the SRC Data Path
- 3-bus implementation for the SRC, Machine Exceptions, Reset
- SRC Exception Processing Mechanism, Pipelining, Pipeline Design
- Adapting SRC instructions for Pipelined, Control Signals
- SRC, RTL, Data Dependence Distance, Forwarding, Compiler Solution to Hazards
- Data Forwarding Hardware, Superscalar, VLIW Architecture
- Microprogramming, General Microcoded Controller, Horizontal and Vertical Schemes
- I/O Subsystems, Components, Memory Mapped vs Isolated, Serial and Parallel Transfers
- Designing Parallel Input Output Ports, SAD, NUXI, Address Decoder , Delay Interval
- Designing a Parallel Input Port, Memory Mapped Input Output Ports, wrap around, Data Bus Multiplexing
- Programmed Input Output for FALCON-A and SRC
- Programmed Input Output Driver for SRC, Input Output
- Comparison of Interrupt driven Input Output and Polling
- Preparing source files for FALSIM, FALCON-A assembly language techniques
- Nested Interrupts, Interrupt Mask, DMA
- Direct Memory Access - DMA
- Semiconductor Memory vs Hard Disk, Mechanical Delays and Flash Memory
- Hard Drive Technologies
- Arithmetic Logic Shift Unit - ALSU, Radix Conversion, Fixed Point Numbers
- Overflow, Implementations of the adder, Unsigned and Signed Multiplication
- NxN Crossbar Design for Barrel Rotator, IEEE Floating-Point, Addition, Subtraction, Multiplication, Division
- CPU to Memory Interface, Static RAM, One two Dimensional Memory Cells, Matrix and Tree Decoders
- Memory Modules, Read Only Memory, ROM, Cache
- Cache Organization and Functions, Cache Controller Logic, Cache Strategies
- Virtual Memory Organization
- DRAM, Pipelining, Pre-charging and Parallelism, Hit Rate and Miss Rate, Access Time, Cache
- Performance of I/O Subsystems, Server Utilization, Asynchronous I/O and operating system
- Difference between distributed computing and computer networks
- Physical Media, Shared Medium, Switched Medium, Network Topologies, Seven-layer OSI Model